
Supplements for Learning Adaptive and Reactive Robot Control
Learning Control Laws
Multi-attractor DS
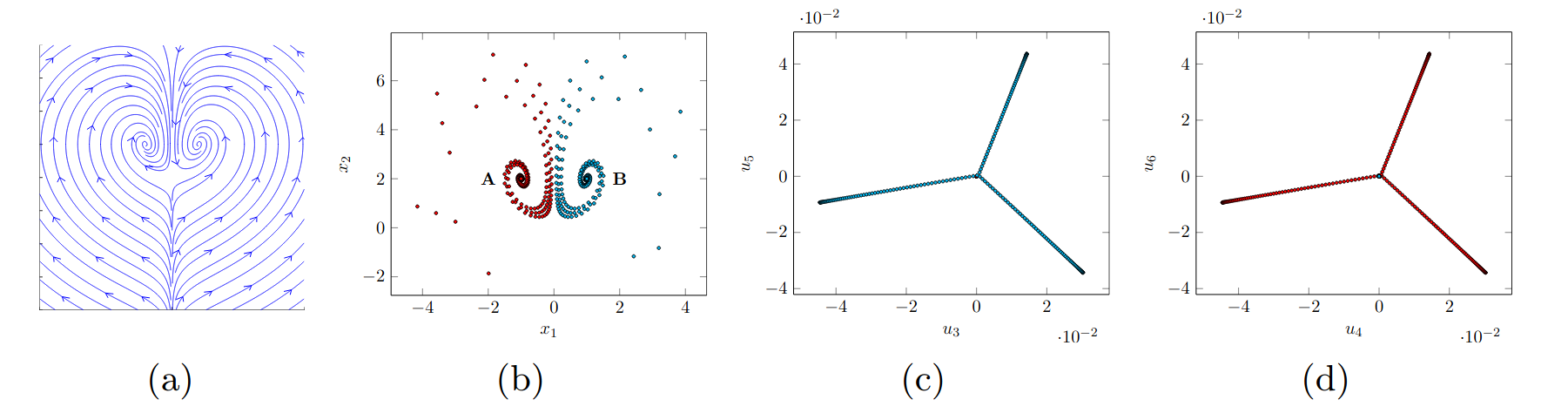
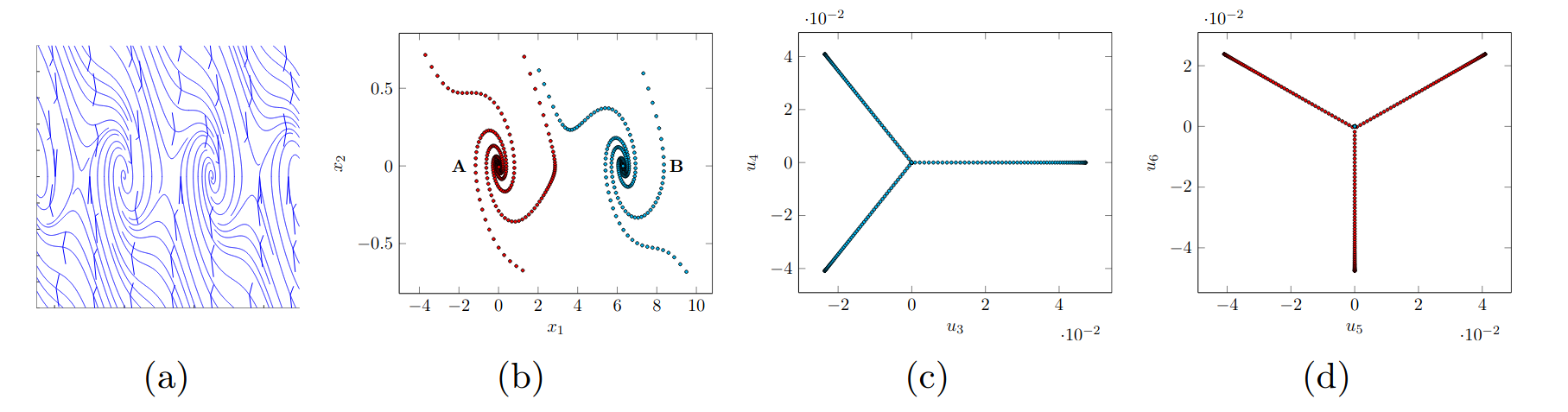
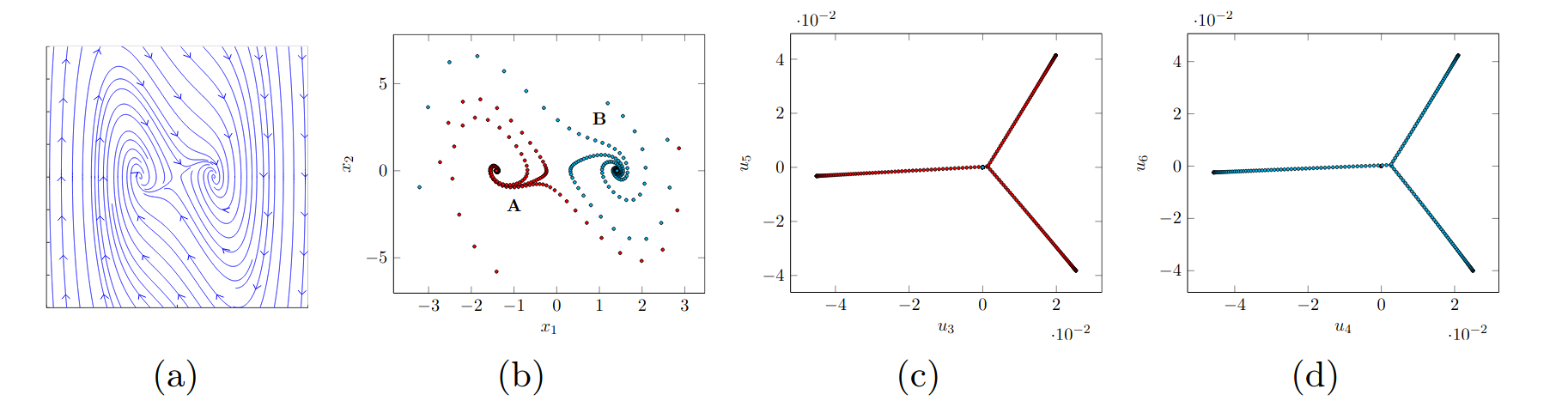
(a) Original Vector field (b) Sub-Sampled trajectories from the DS. (c) Embedding space of the sub-dynamics with a local attractor. (d) Embedding space of the sub-dynamics with a local attractor.
We propose a Graph-based spectral clustering method that takes advantage of a velocity-augmented kernel to connect data points belonging to the same dynamics, while preserving the natural temporal evolution. We study the eigenvectors and eigenvalues of the Graph Laplacian and show that they form a set of orthogonal embedding spaces, one for each sub-dynamics. We prove that there always exist a set of 2-dimensional embedding spaces in which the sub-dynamics are linear and n-dimensional embedding spaces where they are quasi-linear. We learn a diffeomorphism from the Laplacian embedding space to the original space and show that the Laplacian embedding leads to good reconstruction accuracy and a faster training time through an exponential decaying loss compared to the state-of-the-art diffeomorphism-based approaches.
Dynamical system approach to navigation around obstacles
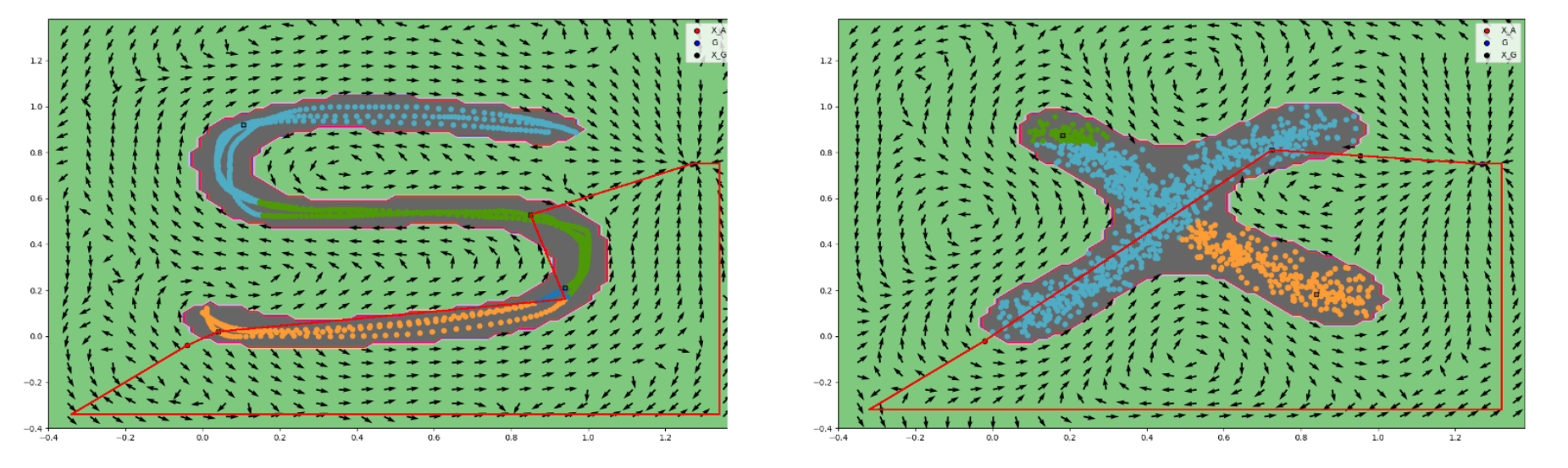
In this article, we propose a dynamical system to avoid obstacles which are star shaped and simultaneously converge to a goal. The convergence is almost-global in a domain and the stationary points are identified explicitly. Our approach is based on the idea that an ideal vector field which avoids the obstacle traverses its boundary up to when a clear path to the goal is available. We show the existence of this clear path through a set connecting the boundary of the obstacle and the goal. We verify the theoretical results presented with various hand drawn obstacle sets. Our methodology is also extended to obstacles which are not star-shaped, and, those which exist in high dimensions.
Obstacle Avoidance
Guaranteed obstacle avoidance of dense and dynamic obstacles in enclosed spaces

Python packages by Lukas Huber for :
This is a closed-form approach to obstacle avoidance for multiple moving convex and star-shaped concave obstacles, inspired from harmonic-potentials fields. It was applied on an autonomous robot (QOLO) in a static complex indoor environment and tested in simulations with dense crowds.
Obstacle Type : Convex, Concave, multiple, moving
Theoritical guarantees : Asymptotic stability, Impenetrability of obstacles hull
Type of dynamics : non-linear, task-space
Fast obstacle avoidance
Python packages by Lukas Huber for : Fast obstacle avoidance
This method addresses the issue of enabling obstacle avoidance based on sparse and asynchronous perception. The proposed control scheme combines a high-level input command provided by either a planner or a human operator with fast reactive obstacle avoidance (FOA). The sampling-based sensor data can be combined with an analytical reconstruction of the obstacles for real-time collision avoidance.
Obstacle Type : Convex, star-shaped, multiple, moving
Theoritical guarantees : Asymptotic stability, Impenetrability of obstacles hull
Type of dynamics : non-linear
Avoidance of concave obstacles through rotation of nonlinear dynamics
Controlling complex tasks in robotic systems, such as circular motion for cleaning or following curvy lines, can be dealt with using nonlinear vector fields. This article introduces a novel approach called the rotational obstacle avoidance method (ROAM) for adapting the initial dynamics when obstacles partially occlude the workspace. ROAM presents a closed-form solution that effectively avoids star-shaped obstacles in spaces of arbitrary dimensions by rotating the initial dynamics toward the tangent space. The algorithm enables navigation within obstacle hulls and can be customized to actively move away from surfaces while guaranteeing the presence of only a single saddle point on the boundary of each obstacle. We introduce a sequence of mappings to extend the approach for general nonlinear dynamics.
Obstacle Type : Convex, star-shaped, multiple, moving
Theoritical guarantees : single saddle point on boundary of obstacle, Impenetrability of obstacles hull
Type of dynamics : dynamic, non-linear
Passive obstacle aware control to follow desired velocities
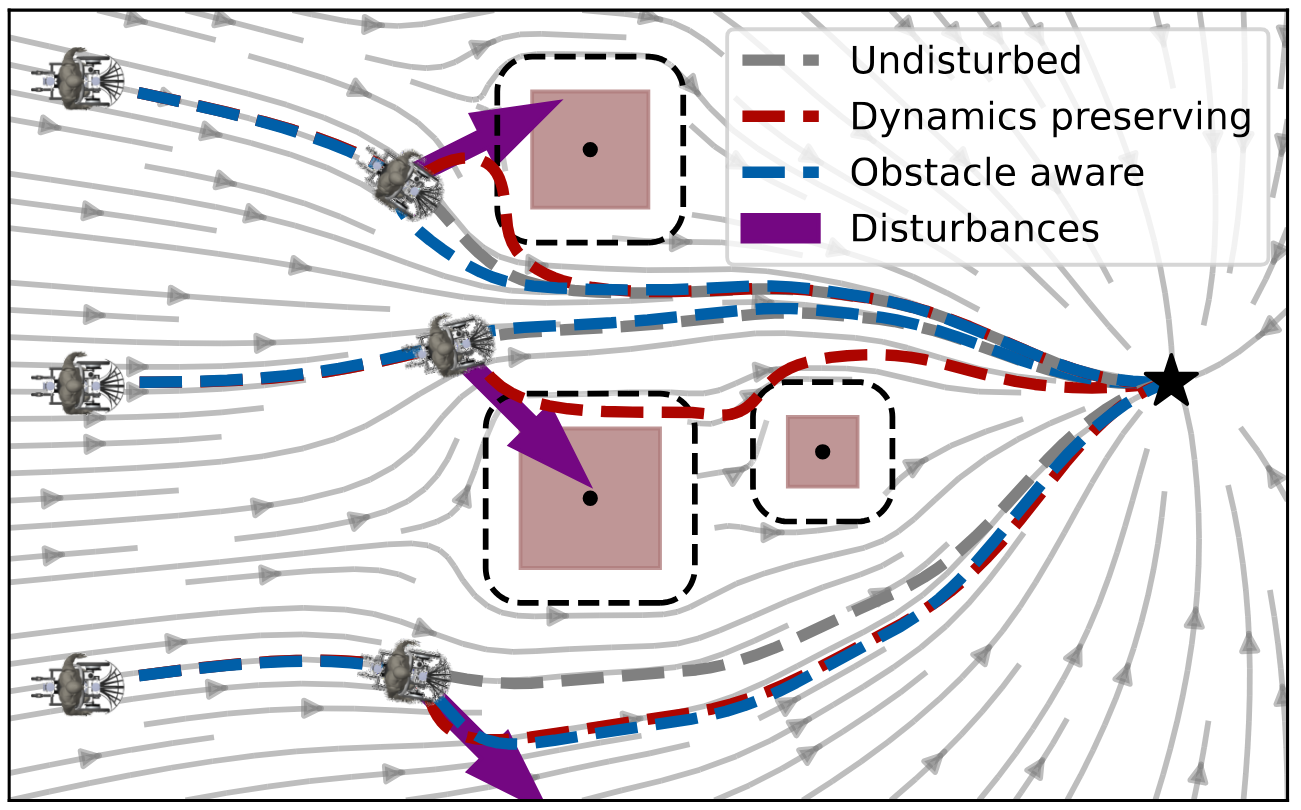
Evaluating and updating the obstacle avoidance velocity for an autonomous robot in real-time ensures robustness against noise and disturbances. A passive damping controller can obtain the desired motion with a torque-controlled robot, which remains compliant and ensures a safe response to external perturbations. Here, we propose a novel approach for designing the passive control policy. Our algorithm complies with obstacle-free zones while transitioning to increased damping near obstacles to ensure collision avoidance. This approach ensures stability across diverse scenarios, effectively mitigating disturbances. Validation on a 7DoF robot arm demonstrates superior collision rejection capabilities compared to the baseline, underlining its practicality for real-world applications. Our obstacle-aware damping controller represents a substantial advancement in secure robot control within complex and uncertain environments.
Real-time Joint-Space Obstacle Avoidance
Python code by Mikhail Koptev for : Reactive joint space obstacle avoidance.
This method uses a neural implicit signed distance function expressed in joint space coordinates, that efficiently computes distance-to-collisions for arbitrary robotic manipulator configurations. This distance function can be used to achieve real-time reactive control by i) formulating it as a collision-avoidance constraint for a quadratic programming (QP) inverse kinematics (IK), and ii) introducing it as a collision cost in a sampling-based joint space model predictive controller (MPC).
Obstacle Type : Convex, Concave, multiple, moving
Theoritical guarantees :
Type of dynamics : non-linear, joint-space